Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
12 13 14 [
15 ]
16 17 18 ...
27 глава 13
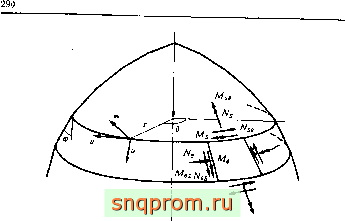
Фнг. 13.9. Осеснмметричная оболочка при несимметричном нагружении Перемещения и результирующие напряжений.
пмеетИТ^ напряжений, соответствующая этим деформациям,
(13.31)
в нее входят три мембранных и три изгибающих напряжения, показанные на фиг. 13.9.
Как и в предыдущем разделе, нагрузки и перемещения разделяются на симметричную и антисимметричную части. После этого при.менение метода не требует дополнительных пояснений.
Подробности читатель может найти в статье Графтона и Строума [10], в которой впервые была рассмотрена эта задача, и во многих других более поздних работах, перечисленных в гл. 12.
Некоторые примеры, иллюстрирующие применение полуаналитического метода к расчету толстых оболочек, даны в гл. 14.
13.7. Заключительные замечания
На нескольких примерах был проиллюстрирован достаточно общий полуапалитический метод, сочетающий в себе преимуще-
Пол1/аналитический метод конечных элементов
ства метода конечных элементов JCЭKoнoмичнocтью, обусловленной разложением по системе ортогональных функций. Конечно, Б этих примерах лишь в небольшой степени используются открывающиеся возможности, однако следует иметь в виду, -что метод действительно экономичен только для некоторых форм рассматриваемых тел и только в тех случаях, когда требуемое число членов разложения ограничено.
Аналогично могут быть решены задачи о призмах, если рассматривать только сегмент тела вращения (фиг. 13.10). Ясно,
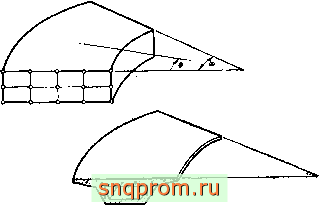
Фиг. 13.10. Примеры призматических сегментных тел.
ЧТО теперь следует проводить разложение по углу /я6/а, а в остальном метод совпадает с описанным ранее.
Существуют и другие возможности скомбинировать преиму-чества аналитических методов с общностью численных методов. Например, если решение имеет особенности, связанные, скажем, с наличием сосредоточенных нагрузок, то их можно исключить с помощью точного решения и решить численно вспомогательную задачу, в которой устранены нарушения гладкости распределенных поверхностных сил. От численного решения при этом не требуется большой точности, и поэтому оно может быть получено более экономичным путем. Описание такого метода дано Зенкевичем и др. [11, 12].
В работе [13] в общих чертах описан несколько иной комбинированный метод, позволяющий исключить особенности, возникающие во входящих углах. Ограниченный объем книги не дает возможности продолжить обсуждение этого вопроса, одна-
КО следует отметить, что за экономичность приходится расплачиваться меньшей общностью.
В этой главе предполагалось, что свойства материала не зависят от одной из координат. В случае необходимости это ограничение с помощью дальнейших обобщений можно снять. Интересный пример такого типа приведен в работе [14].
Размерность задачи можно уменьшить с помощью другого класса методов, основанного на использовании точных сингулярных решений и сведении, скажем, трехмерной задачи к интегральному уравнению на поверхности. Это приводит к необходимости решения уравнения типа
(13,32)
f{p)+\K{p, q)fiq)dSF{p),
где р и q - координаты точек на поверхности S, f(p) - искомая неизвестная функция, К я F - известные функции координат. Такое интегральное уравнение естественно решать методом конечных элементов, разбивая интеграл на отдельные части и используя приближенное представление функции f.
Для решения задач упругости такой подход предложен Мас-соне [15]; Фрид [16] показал, что таким же образом задача об обтекании тела неограниченным потоком сводится к задаче, решаемой с помощью разбиения на конечные элементы лишь одной поверхности.
ЛИТЕРАТУРА
1. Cheung Y, К., The Finite Strip Method in the Analysis of Elastic Plates with Two Opposite Simply Supported Ends, Proc. Inst. Civ. Eng., 40, 1-7 (1968).
2. Cheung Y, K Finite Strip Method of Analysis of Elastic Slabs, Proc. Am. Soc. Civ. Eng., 94, EM6, 1365-1378 (1968).
3. Cheung Y, K., Folded Plate Structures by the Finite Strip Method, Proc. Am. Soc. Civ. Eng., 95, ST, 2963-2979 (1969),
4. Cheung Y, K The Analysis of Cylindrical Orthotropic Curved Bridge Decks, Publ. Int. Ass. Struct. Eng., 29-11, 41-52 (1969),
5. Love A, E. H The Mathematical Theory of Elasticity, 4th ed., Cambridge Univ. Press, 1927, p. 56; есть русский перевод: Ляв А., Математическая теория упругости, ОНТИ, М., 1936.
6. Timoshenko S., Goodier J. N Theory of Elasticity, 2nd ed., McGraw-Hill, 1951,
7. Zienkiewicz 0. C Cheung Y. K., Stresses in Shafts, The Engineer, 24 Nov., 1967.
8. Wilson E, L Structural Analysis of Axi-Symmetric Solids, JAlAA, 3, 2269- 2274 (1965); есть русский перевод; Вильсон, Расчет на прочность осесимметричных тел, Ракетная техника и космонавтика, 3, № 12, стр. 124-131 (1965),
9. Новожилов В, В., Теория тонких оболочек, Судпромгиз, Л 1951.
10. Grafton Р, е., Strome D. R Analysis of Axi-Symmetric Shells by the Direct Stiffness Method, JAIAA, I, 2342-2347 (1963); есть русский период; Граф-
тон, Строум, Расчет осесимметричных оболочек методом прямого определения жесткости. Ракетная техника и космонавтика, 1, № 10. стр. 129- 136 (1963).
11. Zienkiewicz О, С, Gerstner R. W., The Method of Interface Stress Adjustment and Us Uses in Some Plane Elasticity Problems, Int. J. Mech. Set., 2, 267-276 (1961).
12. Zienkiewicz 0, C, Gerstner R, W., Stress Analysis and Special Problems of Prestressed Dams, Proc. Am. Soc. Civ. Eng., 87, PCI, 7-43 (1961).
13. Morley L. S, D,. A Finite Element Application of Modified Rayleigh - Ritz Method, Int. J. Num. Meth. in Eng.. 2, 85-98 (1970 .
14. Stricklin У A De Andrade J. C, Linear and Non Linear Analysis of Shells of Revolution with Asvmmetrical Stiffness Properties, Proc. 2nd Conf. Aat-rix Methods Struct Aiech Air Force Inst, of Techn Wright Patterson A. F, Base, Ohio, 1968.
15. Massonnet C, E Numerical Use of Integral Procedures, Ch. 10 in; Stress Analysis, Zienkiewicz 0, C, Holister G, S eds Wiley, 1965.
16. Fried L, Finite Element Analysis of Problems Formulated by an Integral Equation; Application to Potential Flow, Inst, fiir Statik und Dynamik. Luf-tund Raumfahrtsanstalt, Stuttgart, 1968.
И. 1. Введение
В гл. 8 и 9 были рассмотрены вопросы построения и использования сложных криволинейных двумерных и трехмерных элементов. Казалось бы очевидным, что эти элементы можно непосредственно применять при расчете криволинейных оболочек, уменьшая их размер в направлении толщины оболочки, как показано на фиг. 14.1. Такие элементы использовались в примере, иллюстрированном на фиг. 9.6 для осесимметричного тела. Однако в общем трехмерном случае при применении таких элементов возникают определенные трудности.
Во-первых, наличие трех степеней свободы в каждом узле приводит к большим коэффициентам жесткости для перемещений по толщине оболочки. Это затрудняет проведение числовых расчетов и может явиться причиной плохой обусловленности системы уравнений, если толщина оболочки мала по сравнению с остальными размерами элемента.
Во-вторых, следует учитывать и фактор экономичности. При использовании нескольких дополнительных узлов по толщине оболочки игнорируется хорошо известный факт, что практически даже в случае толстых оболочек нормали к срединной поверхности после деформации остаются прямыми. Тем самым вводится большое число степеней свободы, что влечет за собой неоправданно большие затраты машинного времени.
В настоящей главе описан подход, позволяющий обойти обе эти трудности [1-3]. Для того чтобы повысить экономичность расчета, вводится гипотеза прямых нормалей, а чтобы улучшить обусловленность задачи, не учитывается вклад в энергию деформации напряжений, перпендикулярных к срединной поверхности. Это позволяет получить эффективный инструмент для анализа толстых оболочек. Точность его и широта применения демонстрируются на нескольких примерах.
Ясно, что оба эти допущения являются только частью обычных допущений теории оболочек. Так, умышленно опущено утверждение, что после деформации нормали остаются нормалями к срединной поверхности. Это позволяет учесть деформации сдвига - важную характеристику толстой оболочки.
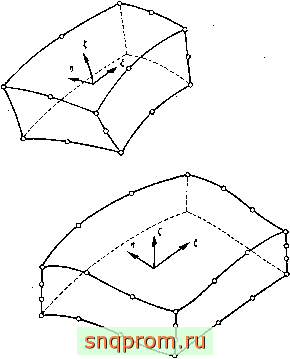
Фнг. 14.1. Криволинейные изопараметрические шестигранники для аппроксимации оболочки.
14.2, Геометрические характеристики элемента
Рассмотрим типичный элемент толстой оболочки (фиг. 14.2). Поверхности элемента криволинейны, тогда как поперечные сечения по толщине образованы прямыми линиями. Форма такого элемента описывается парами точек iepx и (ншкн, заданными их декартовыми координатами.
Пусть 5 и Т1 - криволинейные координаты в средипрюй плоскости оболочки, а t, - линейная координата по толщине. Если положить, что 1, ц, t, изменяются в пределах от -1 до -fl на соответствующих поверхностях элемента, то зависимость между декартовыми и криволинейными координатами для любой точки
РАСЧЕТ ТОЛСТОСТЕННЫХ ОБОЛОЧЕК КАК ЧАСТНЫЙ СЛУЧАЙ ИССЛЕДОВАНИЯ ТРЕХМЕРНОГО ТЕЛА
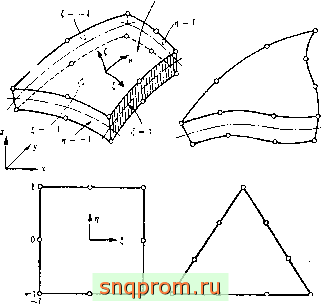
Фиг. 14,2. Различные типы криволинейных элементов для толстых оболочек.
может быть представлена в виде
г) -г^Лерх ..........
(14.1)
Здесь Л^И1> *1)~ функция формы, равная единице в i-м узле и нулю в остальных узлах (гл. 8). Если базисные функции получены из функций формы двумерных первичных элементов, квадратных или треугольных'), и составлены так, что па границах между элементами выполняются условия совместности, то пространственные криволинейные элементы будут примыкать друг к другу по всей границе. Используя функции формы раз-
) Как и в гл. 7, в этом случае вместо координат и г] следует использовать 1-коордннаты,
ЛИЧНЫХ порядков, можно получить разнообразные криволинейные элементы. На фиг. 14.2 показаны только элементы второго и третьего порядков. При желании их можно усовершенствовать, если ввести на сторонах большее число дополнительных узлов. Можно использовать любую из двумерных функций формы гл, 7.
Хотя связь между декартовыми и криволинейными координатами установлена, все же в качестве основных желательно использовать криволинейные координаты.
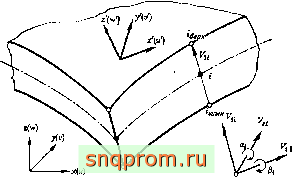
Фиг. 14.3. Локальные и глобальные координаты.
Следует отметить, что направление координаты J только приблизительно совпадает с направлением нормали к срединной повертсности.
Удобно записать зависимость (14.1) с помощью вектора (длины, равной толщине'обо.точки /), связывающего верхнюю и нижнюю точки и координаты срединной поверхности. При этом) соотношение (14.1) принимает вид (фиг. 14.3)
где
+ Y.MifV, (14.2)
) Необходимые сведения из векторной алгебры можно найти в приложении 5.
14.3. Поле перемещений
Определим теперь поле перемещений элемента. Предположим, что деформации в направлении нормали к срединной поверхности пренебрежимо малы. Тогда перемещения внутри элемента будут однозначно определяться тремя декартовыми компонентами узлового перемещения срединной поверхности и двумя углами повората узлового вектора Vjj относительно двух взаимно ортогональных перпендикулярных к нему направлений. Если два таких ортогональных направления заданы векторами единичной длины и Он с соответствующими углами поворота (скалярами) а,- и р<, то по аналогии с (14.2), опуская для простоты индекс сред , можно записать
Г ] Г <]
откуда легко получить обычную форму
Здесь и, о и И) - перемещения в направлениях осей х, у и г глобальных координат.
Так как векторов, нормальных к заданному, бесчисленное множество, то для обеспечения однозначности используются специальные приемы. Некоторые такие приемы рассматривались в гл. 11. Здесь будет описан более простой способ обеспечения однозначности.
Так, если Уз,- - вектор, к которому надо построть нормаль, то направим первую ось по нормали к плоскости, проходящей через этот вектор и ось л'). Построенный таким образом вектор Vh определяется как векторное произведение
V = iXV5,. (14.4)
где

) Алгоритм неверен, если направление вектора V-n совпадает с направлением оси x.. Д.1Я проверки этого условия легко составить программу, н если действительно это имеет место, то для определения локальных направлений используется ось ц.
- единичный вектор по оси х. Разделив (14.4) на длину вектора, получим единичный вектор Va.
Третий вектор, нормальный к первым двум, определяется как векторное произведение
V2; = V XV3,.
(14.5)
Направляющие косинусы локальных осей получаются путем нормирования \ц к Vm- Таким образом, имеем три оси ортогональных локальных координат с единичными векторами
Vii, V2, и Уз,-.
(14.6)
Как и выше, если Nl - функция формы, удовлетворяющая условиям совместности, то перемещения между смежными элементами непрерывны.
Координаты элемента определяются теперь соотношением (14.1), имеющим больше степеней свободы, чем соотношение для перемещений. Следовательно, этот элемент будет элементом суперпараметрического типа (см. гл. 8, разд. 8.3), для которого неочевидно, что критерий постоянства деформаций выполняется. Тем не менее из выражений для компонент деформации следует, что условия допустимости перемещения элемента как жесткого целого и постоянства деформаций выполняются.
При использовании соотношения (14.3) предполагается, что по толщине t, не возникает никаких деформаций. Хотя это направление не совсем точно совпадает с нормалью к срединной поверхности, упомянутое предположение достаточно хорошо аппроксимирует одно из обычных допущений теории оболочек.
В каждой узловой точке i срединной поверхности (фиг. 14.3) имеется пять основных степеней свободы (см. гл. 11, посвященную оболочкам).
14.4. Деформации и напряжения
Для получения характеристик конечных элементов следует определить деформации и напряжения. Если используются основные гипотезы теории оболочек, то существенными являются компоненты в направлениях взаимно ортогональных осей, связанных с поверхностью = const. Таким образом, если в любой точке на этой поверхности построить нормаль г' и две другие ортогональные оси х' и у', касательные к поверхности (фиг. 14.3), то выражения для представляющих интерес компонент деформации будут совпадать с соотношениями гл. 6 для трехмерного случая, в которых, согласно обычной теории оболо-
чек, деформации в направлении г' не учитываются:
УхУ
дх да ду
(14.7)
Следует заметить, что в общем случае ни одно из этих направлений не совпадает с направлениями криволинейных координат I, Г], 1, хотя х', у' лежат в плоскости I, ц ( = const) ).
Напряжения, соответствующие этим деформациям, определяются матрицей {а'}, которая связана с матрицей деформаций матрицей упругости [/)]. Таким образом.
{0-} =
Хху' Ххг' Xyz
= [/)] (К)-{вад + {а^}.
(14.8)
где {е'} и {oj} - произвольные начальные деформации и напряжения.
Матрица [£)] размерности 5X5 может описывать любые анизотропные свойства, а для слоистой конструкции (типа сандвича) она будет функцией от 1. Мы выпишем матрицу [D\ только для изотропного материала. Она имеет вид
1 - v=
о
О О
1 -у
Симметрично
О О
О О
(14.9)
) В самом деле, эти направления только приближенно соответствуют направлениям узловых векторов Vj, и т. д., так как в общем случае вектор Vj, только приближеипо перпендикулярен к срединной поверхности.
где Е - модуль Юнга, а v-коэффициент Пуассона. Коэффициент k, входящий в два последних сдвиговых члена, имеет величину 1,2. Его назначение состоит в том, чтобы улучшить аппроксимацию сдвиговых перемещений. Из определения перемещений видно, что сдвиги почти постоянны по толщине, хотя реальный закон их изменения параболический. Величина й = 1,2 представляет собой отношение соответствующих значений энергии деформации.
Важно обратить внимание на то, что эту матрицу нельзя получить путем исключения соответствующих членов из эквивалентной матрицы напряжений для трехмерного случая гл. 6 [выражение (6,14)]. Чтобы ее получить, надо подставить аг = 0 в (6.13) и сделать соответствующие упрощения, так чтобы это важное допущение теории оболочек выполнялось.
14.5. Характеристики элемента и некоторые необходимые преобразования
Матрица жесткости н матрицы других характеристик элемента содержат интегралы по его объему, которые в самой общей форме имеют вид
(14.10)
\[S]dxdydz,
где матрица [S] - функция координат. Например, для матрицы жесткости имеем соотношение
[s\=m [D] [В],
где в соответствии с определением гл. 2 {в} = [В]{бГ.
(14.11)
(14.12)
Матрица [В], как видно из соотношения (14.7), содержит производные от перемещений по локальным декартовым координатам у', z. Поэтому, для того чтобы вычислить соответствующие интегралы по криволинейным координатам \, т), необходимо осуществить два преобразования.
Прежде всего, точно так же, как это делалось в гл. 8, получим производные по х, у, г. Так как глобальные перемещения и, V, W о. криволинейными координатами связаны соотношениями (14.3), производные от этих перемещений по глобальным
координатам х, у, z определяются матричным соотношением
| | | | | | |
| | | | | dl | |
| | | | | | dX2) |
| | | = V\ | | | 5ч |
| | | | | | |
<Эг | | | | - di | | di |
(14.13)
Здесь, как и раньше, матрица Якоби
[/] =
дх ду
dl dl дх dy
дт] dr]
дх ду/
-Ж Ч
dz dl dz дц dz
(14.14)
вычисляется с помощью соотношений (14.2), определяющих координаты.
Для любой системы криволинейных координат производные от глобальных перемещений можно получить численно. Последующий переход к направлениям локальных перемещений х', у', z позволит вычислить деформации, а следовательно, и матрицу [В].
Сначала нужно установить направление локальных осей. Вектор, нормальный к поверхности J const, находится как векторное произведение любых двух векторов, касательных к этой поверхности. Таким образом.
V.,=
| | ( dx | | | | | |
| | <3r, | | | | | |
ду dl | | dy дп | | | dz dl | | dz дц |
| | | | | | | |
dl J | | [ dn | | | | | |
(14.15)
Следуя описанному выше методу, позволяющему однозначно определить два перпендикулярных вектора, и нормируя их, составим матрицу ортов по осям х', у', г' (которая, по существу, является матрицей направляющих косинусов)
[6] = [t) Уг, Уз].
(14.16)
с помощью обычной операции глобальные производные от перемещений и, v п w преобразуются в локальные производные от локальных ортогональных перемещений:
du dx du dy du dz
dv dw
dx dv dy dv
dx dw dy dw dz дг
[6]. (14.17)
с помощью этого соотношения компоненты матрицы [В'] можно определить в явном виде, причем следует иметь в виду, что для каждого узла существует пять степеней свободы:
{е'} = [В']
Of {Wi)
(14.18)
Величина элементарного объема в криволинейных координатах определяется по формуле
с1х(1ус1г^йеЦЦ((1((цс1.
(14.19)
Этим стандартным выражением завершается вывод основных соотношений.
Численное интегрирование в пределах от -1 до +1 производится точно так же, как и для трехмерных элементов, рассмотренных в гл. 8.
Аналогично вычисляются и все остальные матрицы элемента.
Так как деформации изменяются линейно по толщине (в направлении 1), для интегрирования в этом направлении требуются только две гауссовы точки, тогда как в направлениях , ц для параболической и кубической функций формы используются соответственно три и четыре точки.
Здесь следует заметить, что интегрирование по g при желании можно выполнить точно, экономя тем самым время вычисления. Понижение порядка интегрирования по и г| не только позволяет сократить время счета, ио и приводит к заметному
улучшению хар:актеристик элемента. Этот вопрос будет рассматриваться в разд. 14.9 и 14.10.
14.6. Некоторые замечания относительно аппроксимации напряжений
После получения характеристик элемента процесс составления ансамбля и дальнейшее решение стандартны.
Остается обсудить вопрос об аппроксимации напряжений. Так как деформации определены в локальных координатах, то легко получить матрицу {а'}. Непосредственный интерес представляют именно эти компоненты, но, поскольку направление локальных осей не всегда можно легко себе представить, иногда удобно преобразовать компоненты к глобальной системе, используя соотношение
<Ух | | | | | Хху' Ххг- | |
| | | Гуг | = [0] | | Оу Xyz | [ег. (14.20) |
| | | С1г - | | -Xxz | Хуг' 0 - | |
Если напряжения вычисляются в узле, в котором соприкасаются несколько элементов, они усредняются.
Напряжения в глобальных координатах, однако, не дают достаточно наглядной картины распределения напряжений на поверхности оболочки произвольной формы. Поэтому удобнее с помощью соответствующего преобразования вычислять главные напряжения.
При более тщательном исследовании напряжений на поверхности оболочки целесообразно, заметив, что касательные напряжения Ххг' и Xyz на ней отсутствуют, положить их равными нулю перед переходом к глобальным напряжениям. Значения, полученные для касательных напряжений, являются средними по сечению. Касательные напряж'ения максимальны на нейтральной оси, и их значения превышают средние в 1,5 раза.
14.7. Частный случай осесимметричных толстых оболочек
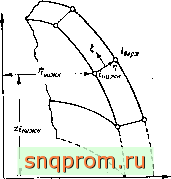
Очевидно, что для осесимметричных оболочек все соотношения упрощаются [1]. Теперь средиьшая поверхность элемента определяется только двумя координатами I, ri, в результате чего значительно экономится машинное время. Элемент строится точно так же, но за основу берется двумер-ный элемент, изображенный на фиг. 14.4. Соотношения (14.1) п (14.2) заменяются их двумерными аналогами, определяющими зависимость
между координатами в виде
==УЛ1 (?)(} +YNdl)V,u (14.21)
) сред
где
{COSj sin.
г- \ - |
| | | |
| | /Г | |
| | | 1 1 \ \ |
| | | --- 1 \ |
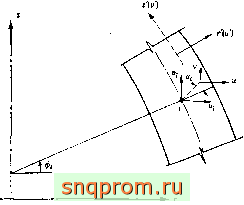
Фиг, 14.4, Координаты для расчета осесимметричной ободочки,
<f>i - угол, показанный на фиг. 14.4, б, м ti - толщина оболочки. Выражение для перемещений определяется в соответствии с формулой (14.3).
Для общности рассмотрим случай несимметричного нагружения, указывая лишь члены, которые можно заранее исключить в симметричном случае. Следуя изложенному в гл. 13, предположим, что выполнено разложение по тригонометрическим функциям. Определим три компоненты перемещения п-й гармоники в виде
(14.22)
Здесь г -угол поворота, показанный на фиг. 14.5; и др.- перемещения узла срединной поверхности и Pi - угол поворота
Фнг. 14.5. Глобальные перемещения осесимметричной оболочки.
относительно вектора, касательного (приблизительно) к срединной поверхности.
Для осесимметричного случая дальнейшее упрощение осуществляется путем исключения членов, содержащих w, первой матрицы тригонометрических постоянных и угла поворота р<.
Локальные деформации удобнее определить соотношением (14.7), записанным в глобальных цилиндрических координатах:
{8} =
Тле
дг dv
dw до
1 ди г й9 +
г д% Т
dw дг
(14.23)
Эти деформации преобразуются к локальным координатам, причем компонента, нормальная к поверхности ri = const, исключается.
Матрица [D\ принимает вид (14.9). Для осесимметричного случая соответствующие члены просто опускаются.
Все преобразования осуществляются так же, как и в предыдущих разделах, поэтому дополнительных пояснений не требуется, за исключением, возможно, замечания, что теперь они производятся только относительно пар переменных , \\\ г, z н г', г'. Аналогично интегралы, входящие в характеристики элемента, вычисляются численно только по координатам \ х\. Заметим, однако, что элемент объема определяется выражением
rfxdt/d2 = det/Idgrfri-dQ. (14.24)
Элементы переменной толщины второго и третьего порядка (фиг. 14.6) получаются при соответствующем подборе функций формы Ai(g).
14.8. Частный случай толстых пластин
Описанные в этой главе преобразования довольно сложны и запрограммировать нх непросто. Основные идеи метода можно применить прн расчете толстых пластин.
Упрощения достигаются за счет того, что:
1) =:г и направления единичных векторов Vh, Уг,-, Узг можно взять совпадающими с направлениями осей х, у и г;
2) ai и pi в этом случае являются просто углами поворота e и 01 (см. гл. 10);
3) нет необходимости преобразовывать компоненты напряжений и деформаций к локальной системе ж', i/, z и всюду


4 ---.

Фиг. 14.6. Элементы осесимметричной оболочки: а - первого порядка, в-- второго порядка и а - третьего порядка.
можно использовать соотношения в глобальных координатах. Для элементов простой формы можно обойтись без численного интегрирования, и в качестве упражнения читателю рекомендуется получить все необходимые выражения (матрицы, жесткости и др.), скажем, для прямоугольных элементов первого порядка.
14.9. Сходимость
Если при расчете трехмерных задач можно говорить об абсолютной сходимости к точному решению упругой задачи, то в аналогичных задачах для пластин или оболочек такой сходимости быть не может. Так называемое сходящееся решение задачи об изгибе пластин при уменьшении размеров элемента сходится к точному решению для некоторой приближенной модели, используемой в расчете. Следовательно, будет наблюдаться схо-
димость к решению, удовлетворяющему гипотезе плоских сечений.
В элементах конечных размеров деформации чистого изгиба всегда сопровождаются некоторыми сдвиговыми напряжениями, которые фактически не учитываются в теории изгиба пластин или оболочек. Большие элементы, деформирующиеся главным
Точное решение по пеории тонких пластин
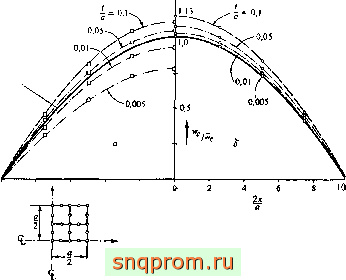
Фнг. 14.7. Свободно опертая квадратная пластина под действием равномерно
распределенной нагрузки q<s. о -прогибы на центральной лявии, полученные прн использовании элемритов, построенных в работе (И; б-прогибы, полученные при нспользованни численного ннтбгрированнн без учета сдвигов. ui=:0,004062 ijjaD (результат расчета по теории тонких пластин), - толщина пластины. В-жесткость пластины.
образом под действием изгибающих моментов (например, когда элемент оболочки вырождается в пластину), становятся заметно более жесткими. Чтобы избежать этого, вводятся некоторые ограничения на отношение длины стороны элемента к его толщине.
Однако можно показать, что эти ограничения могут быть ослаблены за счет понижения порядка интегрирования.
Например, на фиг. 14.7 показано применение элемента второго порядка при расчете квадратной пластины. Приведены результаты, соответствующие интегрированию с девятью (3X3
1 ...
12 13 14 [
15 ]
16 17 18 ...
27