Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
11 12 13 [
14 ]
15 16 17 ...
27 нимают ВИД
= [N(mW, где {б,} =
( dw\
(12.26)
Функция формы состоит из подматриц размерности 2X4 и ее можно получить в явном, хотя и довольно сложном виде.
Если рассматриваются оболочки с патрубками или оболочки с резко' меняющейся толщиной, то узловые параметры в (12.26) использовать не следует. В этом случае их лучше представить в виде
{5,} =
где р,- = dwids - угол поворота а узле, и связать между собой только три первых параметра. Четвертая величина будет свободным параметром, минимизация по которому производится в обычном порядке. Необходимые преобразования осуществляются с помощью соотношения (12.23).
В выражение для матрицы деформаций [В], как видно из определения (12.1), входят и первая и вторая производные по s). Если вспомнить, что производные легко вычислить по правилам, уже использованным при получении (12.25), то для произвольной функции F можно записать
dF ds £F ds
dF [ds
dl I dl
H получить все элементы матрицы [В].
Наконец, матрица жесткости получается после замены переменных в соотношении (12.14)
rfs = -ds (12.28)
и интегрирования в пределах от -1 до -f-l.
) Заметим, что здесь s рассматривается как направление касательной, поэтому dijj/as = 0.
Как и ранее, функции, входящие в интегралы, не позволяют выполнить интегрирование точно, поэтому обычно используется численное интегрирование. Интегрирование производится только по одной координате, так что оно не требует больших затрат времени, и для достаточно точного вычисления жесткости можно использовать необходимое количество гауссовых точек интегрирования.
Матрицы напряжений и другие матрицы вычисляются аналогично.
Приведенная здесь в общих чертах иаопараметрическая формулировка несколько отличается от других [1, 7, 8, 10]. Она обладает тем преимуществом, что позволяет учитывать перемещения элемента как твердого целого и удовлетворяет критерию постоянства первой производной. Доказательство этого проводится так же, как и в разд. 8.5 гл. 8. Другие формулировки допускают деформации при перемещениях элемента как жесткого целого, что, как показано в работе [13], в некоторых случаях не очень опасно. Однако при некоторых видах несимметричных нагрузок (см. гл. 13) этот недостаток может оказаться серьезным препятствием и привести к совершенно неверным результатам. I
При применении любых из рассмотренных здесь конечных элементов состояние постоянного искривления не только не может быть достигнуто, но и'физически невозможно. Однако можно убедиться, что такое состояние достижимо в пределе прн уменьшении размеров элемента.
12.6. Дополнительные неузловые переменные
Введение дополнительных неузловых переменных при расчете осесимметричных оболочек особенно важно, так как оио позволяет достаточно точно аппроксимировать реальную форму при использовании элементов больших размеров.
Добавление выражения
(12.29)
где uj - множество внутренних параметров элемента, а Ы - множество функций, имеющих в узловых точках нулевые значения и нулевые первые производные, к выражениям для нормальных перемещений в (12.26) позволяет значительно улучшить аппроксимацию перемещений без нарушения сходимости (см. гл. 2).
Для тангенциальных перемещений можно не требовать обращения в нуль первых производных в узлах.
Вебстер [И] использовал такие дополнительные функции для прямолинейных элементов.
Независимо от того, прямолинеен нлн криволинеен элемент, к компонентам перемещений, определяемым соотнощением
(12.22), можно добавить выражение (12.29). Если это сделано только для перемещений, а выражения для координат не изменяются [формула (12.18)], то элемент становится элементом субпараметрического типа ). Как показано в гл. 8, он обладает теми же преимуществами, что и изопараметри-ческий элемент.
Особую важность имеет вопрос о том, какие именно выражения должны использоваться для дополнительных функций формы, хотя выбор их достаточно щнрок. Так как прн этом не обязательно использовать полиномы, Делпак [9] применил специальную форму полиномов Лежандра, предложенную Айронсом. Дополнительные функции формы общего вида показаны на фиг. 12.6.
ЛИТЕРАТУРА
1. Grafton Р. е., Strome D. R., Analysis of Axi-Symmetric Shells by the Direct Stiffness Method, JAIAA, I, 2342-2347 (1963); есть русский перевод: Графтои, Строум, Расчет осесимметричных оболочек методом прямого определения жесткости, Ракетная техника и космонавтика, I, № 10, стр. 129- 136 (1963).
2 Popov Е. Р., Penzien J Lu Z. A., Finite Element Solution for Axi-Symmetric Shells, Proc. ASCE, EM, 119-145 (1964).
3. Jones R. E., Strome D. R Direct Stiffness Method of Analysis of Shells of Revolution Utilising Curved Elements, lAIAA, 4, 1519-1525 (1966); есть русский перевод: Джонс, Строум, Расчет оболочек вращения прямым методом жесткостей с помощью криволинейных элементов. Ракетная техника и космонавтика, 4, № 9, стр. 20 (1966).
4. Percy J. Н., Plan Т. Н. Н., Klein S., Navaratna D. R., Application of Matrix Displacement Method to Linear Elastic Analysis of Shells of Revolution,
12.6. Внутренние функции для линейного э.темента.
формы
) Очевидно, что можно было бы включить эту новую функцию формы в общее выражение, характеризующее форму элемента, но практически это не дало бы больших преимуществ, так как кубичный закон позволяет достаточно точно воспроизвести любую реальную форму.
JAIAA, 3, 2138-2145 (1965); есть русский перевод; Перси, Пиаи, Клейн, Наваратна, Приложение матричного метода к линейному упругому анализу оболочек вращения, Ракетная техника и космонавтика, 3, № 11, стр. 199-208 (1965).
5. Klein S., А Study of the Matrix Displacement Methods as Applied to Shells of Revolution, Proc. Conf. on Matrix Method in Structural Mech., Air Force Inst, of Techn., Wright Patterson A. F. Base, Ohio, Oct. 1965.
6. Jones R. E., Strome D. R, A Survey of Analysis of Shells by the Displacement Method, Proc. Conf. on Matrix Methods in Structural Mech., Air Force Inst, of Techn., Wright Patterson A. F. Base, Ohio, Oct. 1965.
7. Stricklin J., Navaratna D. R., Plan T. H. H Improvements in the Analysis of Shells of Revolution by Matrix Displacemenl Method (Curved Elements), AIAA Int., 4, 2069-2072 (1966); есть русский перевод: Стриклин, Наваратна, Пиан, Усовершенствование расчета оболочек вращения матричным методом перемещений, Ракетная техника и космонавтика, i, № 11, стр. 252- 254 (1966).
8. Khojasteh-Bakht М„ Analysis of Elastic-Plastic Shells of Revolution Under Axi-Symmetric Loading by the Finite Element Method, Dept. Civ. Eng. Univ. of California, SE SA 67-68, 1967.
9. Delpak R., Axi-Symmetric Vibration of Shells of Revolution by the Finite Element Method, M. Sc. Thesis, Univ. of Wales, Swansea, 1967.
10 Giannini M, Miles G. A., A Curved Element Approximation in the Analysis of Axi-Symmetric Thin Shells, Int. J. Кит. Meth. in Eng., 2, 459-476 (1970).
11. Webster J. J., Free Vibration of Shells of Revolution Using Ring Elements, Int. J. Mech. Sci., 9, 559 (1967).
12. Новожилов В. В., Теория тонких оболочек, Судпромгиз, 1951.
13. Haisler W. Е., Stricklin J. А., Rigid Body Displacements of Curved Elements in the Analysis of Shells by the Matrix Displacement Method, JAIAA, 5, 1525-1527 (1967); есть русский перевод' Хейслер, Стриклин, Перемещения недеформируемых криволинейных элементов в расчете оболочек матричным методом перемещении, Ракетная техника и космонавтика, 5, № 8, стр. 207-209 (1967),
13.1. Введение
С помощью обычного метода конечных элементов можно решать любые двумерные н трехмерные (или даже четырехмерные) задачи). Однако добавление каждого нового измерения увеличивает необходимое для расчета время, и иногда решение задачи выходит за рамки возможностей машины. Поэтому желательно искать пути сокращения объема вычислений. Ниже будет рассмотрен один класс таких методов, имеющих широкое применение.
Во многих физических задачах геометрия и свойства материала не зависят от одной из координат. Однако нагрузка в этом направлении может быть переменной, что мешает непосредственному переходу от трехмерной задачи к двумерной задаче о плоском деформированном состоянии. В таких случаях все же можно рассматривать упрощенную задачу меньшей размерности (без координаты, вдоль которой свойства не изменяются) и полное решение составить из набора упрощенных решений.
Излагаемый здесь метод носит достаточно общий характер, и, разумеется, его применение не ограничивается только задачами строительной механики. Однако удобно использовать терминологию строительной механики и применить теорему о минимуме потенциальной энергии.
Итак, рассмотрим задачу минимизации квадратичного функционала, описанного в гл. 2 и 3.
Пусть X, у, Z - координаты в некоторой области (не обязательно декартовы). Вдоль координаты г геометрия и свойства материала не изменяются, а значения этой координаты заключены в интервале
0<г<а.
Предположим, что функции формы {/), определяющие закон изменения перемещений [равенство (2.1)], можно записать в
) См. гл. 16, посвященную применению конечных элементов в нестационарных задачах.
виде произведения
{t} = [N(x, у, 2)1 {6Г =
= Х1< y)]ob + [N{x, г/)] sin
{Ьу. (13.1)
При этом мы не ограничиваем общности, ибо с помощью рядов Фурье можно представить любую непрерывную функцию внутри заданной 2(5ластн (прн условии, естественно, что функции фор-мы iV и iV в области определения х, у удовлетворяют тем же самым требованиям). Аналогично и для нагрузки получаем
{р}=Е({Р/К у)}соъ^+Ых, У)}s\r), (13.2)
причем это выражение справедливо как для массовых так и для поверхностных нагрузок (см. гл. 2).
Начальные деформации или напряжения, если оии существуют, можно представить в таком же виде.
Применяя стандартные приемы гл. 2 для определения вклада элемента в уравнение, минимизирующее потенциальную энергию, и рассматривая толь1со вклад {р}, можно записать
(13.3)
В этом выражении, чтобы избавиться от знака суммы, в векторы [ЬУ включены компоненты для каждого значения /. Теперь типичная подматрица Щ будет иметь вид
[k Y=\[BY[D\{B ]dкdudz, (13.4)
а типичная компонента вектора силы
{FY = \\ \[NY{p}dxdydz.
(13.5)
Ясно, что матрица, определяемая соотношением (13.4), содержит в качестве множителей при различных подматрицах еле-
ПОЛУАНАЛИТИЧЕСКИЙ МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ. ПРИМЕНЕНИЕ ОРТОГОНАЛЬНЫХ ФУНКЦИИ
дующие интегралы:
а
Sin-cos-dz,
Sin -- dz.
(13.6)
cos-?51cosd3.
Эти интегралы появляются при перемножении производных, входящих в выражение для [В], и благодаря известному свойству ортогональности
2 = 4 = 0 для 1фт (13.7)
при /= 1, 2, ... и m = I, 2, ... .
Интеграл /, равен нулю, только когда / и т одновременно четные или нечетные. Однако в большинстве практических случаев член, содержащий пропадает. Это означает, что матрица [kf становится диагональной, уравнения для ансамбля имеют вид
[/С ]
= 0 (13.8)
и полная система уравнений разбивается на L отдельных подсистем
[/C l{6} + {f} = 0, (13.9)
где
=\\\ [ВП [D] [в;-] dx dy dz. (13.10)
Из соотношений (13.5) и (13.2) следует, что вследствие свойства ортогональности (13.6) типичное выражение для компоненты нагрузки принимает вид
lУ = \\\{fV{p}dxdydz. (13.11)
Отсюда видно, что 1-я гармоника нагрузки входит только в l-to подсистему (13.9) и не влияет на остальные уравнения. Это крайне важное свойство имеет большое практическое значение.
поскольку оно означает, что если разложение нагрузки в ряд содержит только один член, то необходимо решать лишь одну подсистему уравнений. С уменьшением размеров разбиения лишь в области х, у решение будет стремиться к точному. В итоге трехмерная задача сводится к двумерной, что приводит к сокращению затрат машинного времени.
Очевидно, что аналогичным образом можно свести двумер ные задачи к одномерным и т. д., причем это относится не толь ко к задачам теории упругости. К любой физической задаче сводящейся к минимизации квадратичного функционала (гл. 3) можно применить этот подход, который в том или ином виде не пользовался в строительной механике с незапамятных времен
Следует обращать особое внимание на граничные условия накладываемые на {f}. Для полного разделения задачи гранич ным условиям должен удовлетворять каждый член ряда (13.1) Задание нулевых перемещений в упрощенной задаче фактически означает задание нулевых перемещений вдоль оси г. Поэтому составление окончательной матрицы довольно затруднительно. Это несколько ограничивает возможности применения описанного метода.
Когда нагружеиие таково, что требуется учитывать большое число фурье-компонент, преимущества изложенного метода уменьшаются и иногда бывает экономичнее решать исходную задачу.
Очевидно, что возможны видоизменения основного соотношения (13.1). Так, например, с каждым из тригонометрических членов можно связывать свою независимую систему парамет-
ров {б) . К функции.
)оме того, можно использовать другие ортогональные ак как особенно часто применяются тригонометри-
ческие функции, напомним читателю следующие соотношения:
а
С . /яг
/яг /яг , п i п 1
- COS - dz = О, когда / = О, 1, ...,
(13.12)
smdz=\cosdz = , когда / = 1, 2.....
13.2. Призматический брус
Рассмотрим призматический брус, показанный иа фиг. 13.1, который при 2 = 0 и г=: а закреплен так, что исключаются какие-либо перемещения в плоскости х, у, а в направлении г брус перемещается свободно. Задача существенно трехмерная, поэтому должны быть рассмотрены три компоненты перемещений и, V и W.
Разбивая область в плоскости х, у на конечное число элементов, можно задать 1-т компоненту перемещения в направлении I в виде
u = [Nu N ...]ът{и'}. (13.13)
Для о' и w можно записать аналогичные выражения, но в последнее будут входить косинусы. В этих выражениях N\ и т. д.-
Фиг. 13.1. Сведение задачи о призматическом брусе к набору двумерных конечно-элементных задач.
(скалярные) функции формы, соответствующие используемому элементу. Если, как показано на фиг. 13.1, применяются треугольники, то функции формы задаются соотношением (4.8) гл. 4.
Однако могут использоваться также более точные элементы, описанные в гл. 3 (с использованием преобразований гл. 8 или без них). Разложение (13.13) обеспечивает равенство нулю перемещений и у и осевых напряжений на концах бруса.
Нагрузку тоже можно представить в виде рядов Фурье, тогда для компонент в плоскости х, у имеем
{p} = {p}sin. (13.14)
Если задача существенно трехмерная, то выражение для деформации должно содержать все шесть компонент. Такое выраже-
ние приведено в гл. 6 [см. соотношения (6.9) -(6.11)]. После подстановки функции формы (13.13) для типичного члена матрицы [В] получим
| | дх V | | |
| | | dNt - sin Y ду | |
| | | | -iVsinv |
[в!] = | -г- sin Y | | |
| | | Л^;- cosy | |
| | , In у,-cosy | | дх Y |
(13.15)
где Y = Ьг/а. Удобно представить это' выражение -в виде суммы
[B!] = [Bnsini-f[B]cos
я.г
(13.16)
Во всех приведенных соотношениях полагалось, что параметры располагаются в обычном порядке:
1 !
(13.17)
а оси координат направлены, как показано на фиг. 13.1.
Матрица жесткости вычисляется обычным образом, если принять во внимание, что
[й1;Г= \ \ \ IbiT[D][bi] dxdydz. (13.18)
Это соотношение после подстановки в него выражения (13.16), перемножения и использования (13.12) принимает вид
[;;j=.S] mY\D]m+{W\D]m-\)dxdy, (13.19)
где /= 1, 2.....
Интегрирование теперь производится по площади элемента ). Члены, обусловленные распределенной нагрузкой, на-
) Следует отметить, что теперь даже в случае простого треугольника интегрирование нетривиально, так как в [В] входят некоторые линейные члены.
чальными напряжениями и т. д., имеют вид (13.14). Сосредоточенные вдоль линий нагрузки представляются непосредственно в виде узловых сил
sindz = {F}±, (13.20)
где [F] - интенсивности на единицу длины..
Граничные условия, которым удовлетворяют использованные выражения, соответствуют условиям свободного опирания бру-
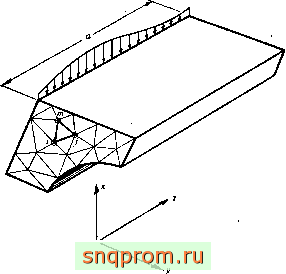
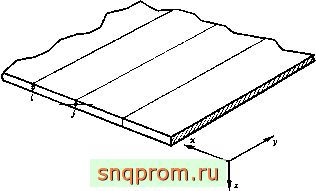
Фиг. 13,2. Сведение расчета коробчатого моста к двумерной задаче с использованием изопараметрических элементов второго порядка.
са. С помощью аналогичных разложений можно удовлетворять другим граничным условиям.
Рассмотренный метод может быть применен ко многим практическим задачам, в частности к расчету бетонного моста, показанного на фиг. 13.2. Здесь особенно удобны криволинейные элементы сирендипова семейства второго или третьего порядка, описанные в гл. 7 и 8.
Отметим, что удвоение числа параметров и запись рядов в виде двух сумм
{f}=.YN(x, y)cosl{6) + YN{x, y)sin{b } (13.21)
позволяют устранить некоторые ограничения на функции формы, определенные выражениями (13.1) или (13.13). Параметры {6} и {6} являются независимыми, и для каждой компоненты перемещений необходимо определять два значения и составлять два уравнения.
Другой вариант описанного выше приема состоит в представлении функции в виде
{f} = X[iV(x, у)е>-!-Цт\
где [Щ н {6} являются комплексными величинами. Тождественность этого выражения выражению (13.21) легко устанавливается, если учесть, что
gi9 cos 9 -f ( sin 9.
Для оперирования с комплексными величинами имеются стандартные программы.
13.3. Коробчатая конструкция
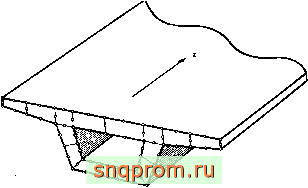
В предыдущем разделе трехмерная задача сводилась к двумерной. Здесь же показано, что аналогичная задача может быть решена с использованием одномерных элементов (фнг. 13.3).
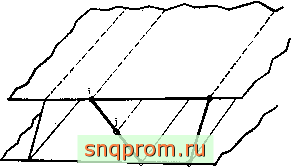
Фиг. 13.3. Расчет мембранной коробчатой конструкции с помощью одномерных элементов.
Коробчатая конструкция выполнена из тонких листов, способных воспринимать нагрузку только в своей плоскости. Как и в предыдущем случае, в каждой точке необходимо рассматривать три перемещения, для каждого из которых можно задать одинаковый закон изменения. Однако типичный элемент ij является одномерным в том смысле, что интегрирование надо производить только вдоль линии (/ и напряжения учитываются
только в этом направлении. Легко показать, что решение этой, задачи аналогично решению задачи о шарнирио-стержневой системе.
13.4. Чистый изгиб пластин и коробчатых конструкций
Рассмотрим прямоугольную свободно опертую по краям пластину, вся энергия деформации которой уходит на изгиб. В этом случае деформированное состояние полностью определяется только одним перемещением w (см. гл. 10).
Фиг. 13.4. Метод полос для плит.
Обозначим через у направление, в котором геометрия и свойства материала не изменяются (фиг. 13.4). Чтобы обеспечить непрерывность угла наклона, функции формы должны содержать параметр О,-, характеризующий угол поворота.
Воспользуемся балочными функциями и для типичного элемента ij запишем
что обеспечивает выполнение условий свободного краев. Типичными узловыми параметрами являются
(13.22) опирания
(13.23)
Необходимым требованиям удовлетворяют функции формы третьего порядка, которые, по существу, идентичны функциям, использованным для расчета осесимметричных оболочек (гл. 12). Следуя определениям гл. 10, находим деформации (искривле-
ния) и составляем матрицу [В]. Таким образом, двумерная задача сведена к одномерной.
Этот метод разработай Ченгом [1--3] и назван им методом конечных полос . Он использовался для решения ряда задач о прямоугольных пластинах, коробчатых балках, оболочках и различных складчатых конструкциях из пластин.
Для разъяснения уместно привести один пример из указанных работ. Это задача о квадратной равномерно нагруженной пластине с тремя свободно опертыми сторонами и одной защемленной. При решении использовались десять элементов-полос по оси X. В табл. 13.1 приведены результаты, соответствующие первым трем гармоникам.
Таблица 13.1
Квадратная пластина с тремя свободно опертыми и одной защемленной сторонами под действием равномерно распределенной нагрузки ч
v=0,S | Прогиб в центре пластины | Момент в центре пластины | Максимальны!) отрицательный момент М |
1 = 2 1 = 3 2 | 0,002832 -0,000050 0,000004 0,002786 | 0,0409 -0,0016 0,0003 0,0396 | -0.0858 0,0041 -0,0007 -0,0824 |
Точное решение | 0,0028 | 0,039 | -0,084 |
Множитель | | | |
Важно не только то, что точное решение для каждой гармоники / получить довольно просто, поскольку приходится определять лишь девять неизвестных, но и то, что члены высших порядков быстро уменьшаются.
Обобщение этого метода на случай коробчатой конструкции, для которой существенны и мембранные и изгибные эффекты, представляется почти очевидным, если этот пример рассмотреть вместе с примером предыдущего раздела.
В другой статье Ченга [4] показано, что можно использовать и отличные от тригонометрических функции, хотя при этом возможно лишь частичное разделение задачи.
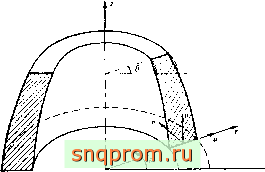
13.5. Осесимметричные тела при несимметричном нагружении
Наиболее характерным и, по всей видимости, самым ранним практическим применением разложения Фурье явилось исследование осесимметричных тел под действием несимметричной нагрузки.
В этом случае, кроме радиального (и) и осевого (у) перемещений (как в гл. 5), следует рассматривать и тангенциальную компоненту w, соответствующую направлению угла 9 (фиг. 13.5). Именно в этом направлении геометрия и свойства материала постоянны, поэтому его следует исключить.
В целях упрощения рассмотрим отдельно симметричные и антисимметричные относительно оси 9 = 0 компоненты нагрузки. Используя только выражения для узловых сил (выражения
Фиг. 13.5, Осесимметричное тело. Координаты и перемещения.
для объемных сил, краевых условий, начальных деформаций и т. д. аналогичны), запищем силы на единицу длины по окружности (фиг. 13,6, а) в виде .
L
R=T. Rcos IB,
Z=i; Zcos/9,
(13.24)
T=ZTsml(i
no осям координат для симметричной нагрузки. Для Т используется несимметричное разложение по синусам, чтобы сохранить в направлении Т симметрию при 9 > я.
Компоненты перемещений снова описываются двумерными (г,г) функциями формы, соответствующими используемому типу элемента; вследствие симметрии они имеют aHa,forH4HbiH
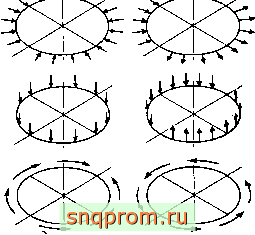
Фиг. 13,6, Симметричные (а) и антисимметричные (б) компоненты перемещений и нагрузок в осесимметричном теле.
выражению (13.13) вид
u = [N[, т, ...] cos Ш{и'У,
v=[Nu Ni, ...lcos;9{t>r. (13.25)
w = [m, m, ...]smlQ{wY.
В дальнейщем необходимо использовать общее выражение деформации в цилиндрических координатах для трехмерного случая (см. [5])
ду dz
{е} =
Угг
и , да)
дв ду дг
1 ди , dw w Т~Ш ~дг г \ dv , dw
(13.26)
Как и прежде, матрицу жесткости и другие величины можно вычислить для каждой гармоники в отдельности. Подставляя формулы (13.25) в (13.26) и группируя переменные, как это сделано в (13.17), получаем
- COS/9 О
О
dNi дГ
C0SZ9
О
о
-!-cos/9
-COS/9
, IN[
Sin /9
(13.27)
Остальные соотношения выводятся обычным путем, и читатель может получить их в качестве упражнения.
Для антисимметричного нагружения, показанного на фиг. 13.6,6, в соотношениях (13.24) и (13.25) просто заменим синус на косинус и наоборот.
Величины усилий для каждой гармоники получим из выра-
при 1,2,
= 2л
(13.28)
при / =0.
при /=1
,......J
при/ = 0. (13.29)
Аналогично для антисимметричного случая
О О
Отсюда и из выражения для [kf видно, что при / = О, как и ожидалось, задача сводится к двумерной, а при симметричном нагружении становится, кроме того, и осесимметричной.
1ри антисимметричной нагрузке, когда 1= О, остается только одна система уравнений относительно переменной да. Это
соответствует действию постоянных тангенциальных усилий и эквивалентно задаче о кручении валов (фиг. 13.7). Последняя решается классическими методами с использованием функции напряжений [6] и для сравнения была исследована методом конечных элементов [7]. Рассмотренный здесь подход более естествен.
К расчету осесимметричных тел изложенный подход впервые был применен Вильсоном [8].
7Л
Фиг. 13.7. Кручение стержня переменного сечення.
На фиг. 13.8а и 13.86 приведен простой пример, иллюстрирующий влияние различных гармоник.
13.6. Осесимметричные оболочки при иесимметричиом иагружеиии
С помощью описанного подхода изложенный в гл. 12 метод расчета осесимметричных оболочек легко распространить на случай несимметричного нагружения. Однако теперь следует учесть три компоненты перемещений и усилий (фиг. 13.9). Будем рассматривать три мембранные и три изгибные компоненты и, обобщая формулу (12.1), определим деформацию
как [9]!)
Ч
.Xse
ди ds
-+(дасо5 +usin)i-\ ди , до . J I
1 dw
dw , dv , sin Ф dw
ds cos ф
г'тф dw
dsdB
COS Ф dv
sin Ф cos Ф
3.30)
) По причине существования множества теорий оболочек можно использовать и другие соотношения. Приведенные здесь соотношения являются достаточно общепринятыми.
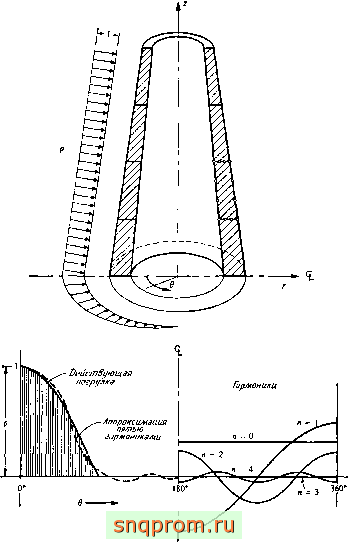
Фиг. 13.8а. Осесимметричиая башня ПОД действием несимметричиой нагрузки. При решении используются четыре элемента третьего порядка. Показаны гармоники, по которым раскладывается нагрузка.
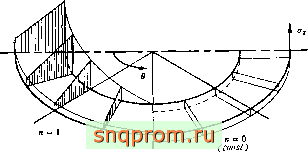
(при 0>п11 знак меняется)
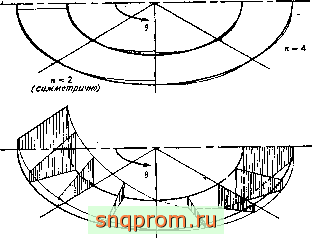
Суммврное напряжение
Фиг. 13.86. Распределение вертикальных напряжений а, в осаованни, соответствующих отдельным гармоникам, и суммарных напряжений. (Напряжение для третьей гармоники тождественно равно нулю.) Первые две гармоники позволяют получить практически точный результат.
10 JaK. 61;
1 ...
11 12 13 [
14 ]
15 16 17 ...
27