Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
35 36 37 [
38 ]
39 40 41 ...
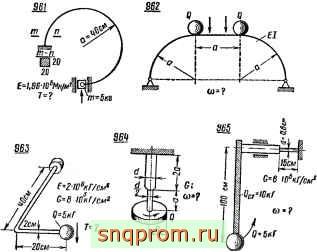
48 Пример 121. Дано: Q, а. I, Е. I (рис. 221).
Определить ю, Л', Т.
Решение. Так как угол поворота груза Q вокруг центра шарнира левой опоры 9=327. го жесткость балки
а

Рис. 219
Рис. 220
Рис. 221
Мо.меит инерции массы груза относительно оси его поворота По формулам (225) круговая частота колебания частота колебания
Л> 1 /3£/g ;
период колебания
3£/g
Пример 122. Дано: Q, I, у пружины: D, d, п (п - чисто виткоз), G Стержень АВ - абсолютно жесткий и невесомый (рис. 222).
Определить круговую частоту колебания ю в функции от положения груза Q, т. е. от расстояния х.
Решение. Растягивающая пружину сила P=Q.
Вертикальное перемещение точки А:
8РРп
где / , = j dm = -L f pdV - момент инерции массы груза от-носительно его оси вращения кГ-см сек' (в СИ / = рМт =
т
-(- вес единицы объема груза V, кПсм;
ро- плотность, масса единицы объема V, кг/мЦв СИ);
р - расстояние элемента объема dV от оси вращения, см (л);
С=--жесткость системы, кГ-см (н-м), где М - момент,
действующий статически в сечении подвеса груза в направлении колебания кГ-см (н-м); q> - угловое перемещение сечения, в котором приложен момент М от его статического действия, рад
Пример 119. Дано: Q=16 кГ, а=2 см, £=2-10 кГ/см\ Г=0,1 сек (рис. 219)
Определить /.
Решение. Так как период колебания Т = 2я /-, то
С другой стороны, от статического действия силы Q прогиб свободного конца балки 8=--. Поэтому
TS , утШГ Y 1-981-3.2-10 -2 .
Пример 120. Дано: т=20 кз, Ь=8 см, /=40 см, N=20 кол/сек, 0=8-10 Мн/м^ (рис. 220), Определить а.
Решение. Так как - = 2 > то
С = 47rW/ = 8TNn\
С другой стороны, жесткость стержня при кручении С/ G-0,14a*
О - - Ли
/ ~ /
где /];=0,14 а*- момент инерции при кручении квадратного сечения со стороной а. Поэтому
- = 8;гWm/, и а= 7
0,14G
= -8.10.4.10.20-6410-та1 J д,. jQ., 195
Так как стержни соединены параллельно, то жесткость колеблющейся системы по формуле (221)
с = с, + с..( + * ).
Момент инерции массы цилиндрического диска относительно оси его вращения
1 г = IР' -J- 1 = 2vr -1- Л I fdp =
32 g
По формуле (225) круговая частота колебания диска
пример 124. Дано: для балки для стержня /г.
Ег, Ръ Q (рис. 224) Определить Т.
Решение. Жесткость балки на двух опорах с изгибающей силой посередине
48£,/,
Жесткость стержня при растяжении
Так как балка и стержень соединены последовательно, то по формуле (224) жесткость колеблющейся системы
48£,/, EF По формуле (224) период колебания системы
Вертикальное перемещение точки С:
8QD-n
Круговая частота колебания груза
ш = = if.
у Ъг 2Dx У
2QDn
Рис 222


Рис. 223
Рис. 224
Эту задачу можно решить и иначе, исходя не из поступательного, а из вращательного движения груза Q. Тогда:
угловое перемещение груза 9 = ;
восстанавливающий момент М=Р1;
м рр жесткость системы С = - =
момент инерции массы груза относительно оси его вращения
т -
круговая частота колебания груза
2QDn
Пример 123. Дано: для стержней h, di, G Zg, d? Gz; для диска -f (вес единицы объема), D, h (рис. 223).
Определить ш - круговую частоту колебания диска. Решение. Жесткости стержней при кручении
Gr.dl 321.
Свободные колебания упругих систем с учетом собственной массы
При свободных колебаниях упругой системы распределенную собственную массу то можно приближенно учесть, приведя ее в точку подвеса груза и сложив с массой т последнего.
Приведенной массой т„р является такая масса, сосредоточенная в точке подвеса груза, кинетическая энергия движения которой равна кинетической энергии движения массы системы /По- Величина приведенной массы пропорциональна величине истинной массы и определяется по формуле
т„е=к^тв Коэффициент приведения массы k
(226)
зависящий от закона изменения скоростей движения элементов массы то, устанавливается из условия равенства кинетических энергий движения т„р и то, которое приводит к выражению
(227)
где 8 и 8 - обобщенные перемещения точки подвеса груза и произвольной точки системы при статическом действии на иее обоб-
13 Заказ № 886
Задачи 954-965. Определить величины, указанные в условиях задач, для систем, испытывающих колебания.
На рисунках стрелкой около груза указано направление колебания.
а) щ
5)а
£=9,8 Ш Мн/м' ~ F--tnM
/яг
01225 н/м 1 m = (/<2
2F-I

-2а Т=?
д
Грузы д ноледттея синхронно
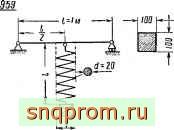
Е'Щ^кГ/ом п=5витков, В'в-Ю^кГ/ем
где и /и,- моменты инерции массы груза т и массы системы Ото относительно оси вращения.
Рассмотрим примеры учета собственной массы призматических стержней для простейших видов их свободных колебаний.
Пример 125. Продольные колебания. Дано: Q, ч, Р, а, Ь, Е (в СИ даио: масса груза т. кг, плотность стержня ро кг/м^, F, а, Ь, Е, рис. 225, а) а)
Определить Т.
Решение. При статическом действии груза Q отношения линейных перемещений (удлинений и укорочений) произвольных сечений (определяющихся координатами Хи и сечения, где расположен груз, соответственно равны
1
ъ - а 5
На основании выражения (228) коэффициент приведения массы
а+Ь
т
Так как участки стержня соединены параллельно, то по формуле (221) жесткость системы
а Ь аЬ
Собственная масса стержня та-{а+Ь), масса груза
/п = -§- [в CHOT = p(a-f 6)].
* Рис. 225
По формуле (229) период свободных колебаний системы Т--в СИ: Т.
= 2. i/i = 2.. (. + е^ i±*).
Частные случаи (рассматриваются в технической системе).
шейной силы, соответствующей виду деформации системы при колебании и приложенной в точке подвеса груза в направлении колебания.
Для прямолинейных стержней с постоянным поперечным сечением коэффициенты приведения массы можно определять по формуле
(228)
где dx - элемент длины стержня; / - его длина.
Круговая частота ш, частота Л' и период Т свободных колебаний упругой системы с учетом собственной массы устанавливаются по следующим формулам:
а) при возвратно-поступательном движении
2ri r m+A ,mi)
(229)
где Q=mg и Qo= og- вес груза и системы; 8 = - линейное перемещение точки подвеса груза при статическом действии иа систему силы Q в направлении колебания; б) при возвратно-вращательном движении
Г = 2я + ftnlntg
Период свободных колебаний балки находится из выражения (229):
пример 127. Крутильные колебания. Даио: Q, D, т, d, а, Ь. G (рис. 227, а) Определить Т.
Решение. При статическом действии вращающего момента в сечеиии подвеса диска отношения угловых перемещений (углов поворота) произвольных сечений (определяющихся координатами л: jcj) и сечения подвеса диска соответственно равны:
6 ф а 6 ф i
В соответствии с формулой (228) коэффиш1ент приведения массы стержня
а+Ь
Так как участки стержня соединены параллельно, то по формуле (221) жесткость системы
01р Glp a + b d* а + Ь
Момент инерции массы цилиндрического стержня относительно его геометрической оси
Рис. 227
Момент инерции массы цилиндрического диска весом Q и диаметром D
По формуле (230) период свободных колебаний системы у^2 у^-+--0 2г|/
Glp(a + b)
.4,1--1/- 2/l £±1\
Если груз Q подвешен к стержню длиной а, а стержень с длн-
ной b отсутствует (рис 225, б), то, полагая -у=0. получим
Если груз Q опирается на стержень длиной Ь, а стержень длиной а отсутствует (рис. 225, в), то
Пример 126. Поперечные колебания. Дано: Q, у, F, I, Е, I (рис. 226).
Определить Т.
Решение. При статическом действии груза Q линейное перемещение (прогиб) произвольного сечения, находящегося на расстоянии X от левой заделки, определяется методом начальных параметров

Рис. 226
1 1.. Q
8 = £Г(о-2---2-- -g-j-
Из условия симметрии балки
Поэтому
48EI
По формуле (228) коэффициент приведения массы балки
, 2 /8jr\a, 32/о j,x-Y 13
= -1 (-f) = - J (3 IT- =35-
Собственный вес балки Q=(Fl.
1 ...
35 36 37 [
38 ]
39 40 41 ...
48